 Contact Us
Contact Us
VSD CONTROL METHODS
Do you know the differences between Variable Frequency Drive (VFD) control methods and what affect they can have on your application performance? By control method we are not talking about I/O sequencing to start or stop the motor but how the VFD drives the motor itself.
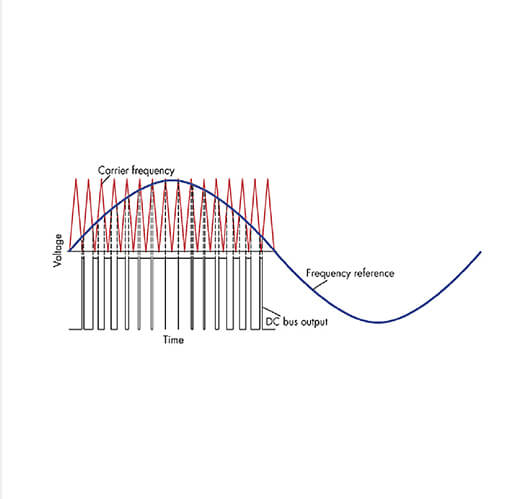
At a basic level a VFD effectively changes the AC frequency sent to the motor to in turn control the motor speed – why they are often called inverters. All drives use Pulse Width Modulation (PWM) to send pulses of various widths to the motor. The high inductance of the motor effectively averages the pulses and the current in the motor winding becomes more sinusoidal. The frequency the VFD determines if it should change the state of the output is called the “carrier frequency” and is typically 2 orders of magnitude greater than the motor base frequency.
The basic control available in nearly all inverters is Voltage Frequency (V/F) control. The drive uses a pre-set pattern of output voltage and frequency that cannot be changed during operation.
This is a simple control method and requires limited setup configuration. Speed control accuracy is typically only 2-3%, speed range (the minimum speed the drive can run the motor) and motor response is low. Due to its simple setup it is widely used for simple pump, fan and conveyor applications. Tighter speed control and higher frequency response is possible by using an encoder but the motor performance, primarily starting torque, is not improved.
Vector control is an advanced control algorithm for tighter speed control. The drive uses a model of the magnetic flux and current sensing in its control and is also often known as flux control. Open Loop Vector (OLV) control allows 200% rated torque at 0.3Hz and 0.2% speed control accuracy. It allows four quadrant torque limiting for applications like lifts or bottle capping. This feature can also protect mechanical equipment from overload and be used to sense a mechanical failure in the driven system. OLV control is very sensitive to the motor dynamics and auto tuning must be performed for the VFD to achieve the control accuracy.
Closed Loop Vector (CLV) control uses the same control system as OLV but is enhanced with the use of encoder feedback. This allows 200% torque at 0 rpm, 0.02% speed control accuracy, a wider speed control range and direct torque control. A great feature set for applications like lifts, winders and tensioners. The combination of feedback and holding torque are features often described as “servo like” and makes positioning with an induction motor a possibility.
